5. Conexión de productos compatibles de otros fabricantes
5.1. Conexión de un inversor FV
La medición de la salida de un inversor FV le proporcionará al usuario una visión general del equilibrio energético y de la distribución de energía en cada momento. Tenga en cuenta que estas mediciones solo se usan para mostrar información. La instalación no las necesita ni las usa para su funcionamiento. Además de monitorizar, el dispositivo GX también puede limitar algunos tipos y marcas de inversores FV, es decir, reducir la potencia de salida. Esto se usa, y es imprescindible, para la opción de Inyección a la red limitada o nula de los ESS.
Conexiones directas
Tipo | Zero feed-in (sin devolución a la red) | Detalles |
|---|---|---|
Fronius | Sí | Conexión LAN, véase GX - GX - manual Fronius |
SMA | No | Conexión LAN, véase GX - GX - manual SMA |
SolarEdge | No | Conexión LAN, véase GX - manual SolarEdge |
ABB | Sí | Conexión LAN, véase GX - manual ABB |
Uso de un contador
En el caso de inversores FV que no sean compatibles con una interfaz digital, se puede usar un contador:
Tipo | Zero feed-in (sin devolución a la red) | Detalles |
|---|---|---|
No | Conectado a la entrada analógica del inversor/cargador. Menor coste - menor precisión. Contador de energía | |
No | Conectado mediante un cable o de modo inalámbrico al CCGX con nuestro convertidor Zigbee a RS485. Véase la página de inicio de Contadores de energía | |
Sensores inalámbricos de CA | No | Véase el manual del sensor inalámbrico de CA - Producto descatalogado |
5.2. Conexión de un GPS USB
Un GPS permite hacer un seguimiento a distancia de vehículos o barcos desde el portal VRM. También es posible configurar una geocerca (geofence) que enviará una alarma automáticamente cuando el sistema salga de una zona determinada. Se pueden descargar archivos gps-tracks.kml para abrirlos en Navlink y Google Earth, por ejemplo.
Victron no vende GPS-USB pero el CCGX acepta módulos GPS de otros fabricantes que utilicen los comandos NMEA 0183, que son los que usan casi todos. Puede comunicarse a tasas de baudios de 4800 y 38400. Enchufe la unidad en cualquiera de las tomas USB. La conexión puede tardar unos minutos, pero el CCGX reconocerá automáticamente el GPS. La ubicación de la unidad se enviará automáticamente al portal VRM y se mostrará su posición en el mapa.
Se ha probado la compatibilidad de CCGX con:
Globalsat BU353-W SiRF STAR III 4800 baudios
Globalsat ND100 SiRF STAR III 38400 baudios
Globalsat BU353S4 SiRF STAR IV 4800 baudios
Globalsat MR350 + BR305US SiRF STAR III 4800 baudios
5.3. Conexión de un GPS NMEA 2000
En lugar de un GPS USB, se puede usar un GPS NMEA 2000 para hacer un seguimiento a distancia de vehículos o barcos desde el portal VRM.
Los transmisores GPS NMEA 2000 de otros fabricantes deben cumplir los siguientes requisitos:
La clase de dispositivo NMEA 2000 ha de ser 60, Navegación.
La función del dispositivo NMEA 2000 ha de ser 145, Posición de la propia nave (GNSS).
La posición (latitud, longitud) debe transmitirse en PGN 129025.
La altura, que es opcional, debe transmitirse en PGN 129029.
El rumbo y la velocidad (opcionales) deben transmitirse en PGN 129026.
En principio, la mayoría de los GPS NMEA 2000 deben funcionar. Se ha probado la compatibilidad con:
Garmin GPS 19X NMEA 2000
Para conectar una red NMEA 2000 al puerto VE.Can del dispositivo GX, cada uno con un conector de distinto estilo, hay dos soluciones:
El cable VE.Can a NMEA 2000. Permite activar o desactivar la red NMEA 2000 a través del equipo de Victron simplemente insertando o quitando su fusible. Tenga en cuenta la advertencia que se indica más adelante.
El adaptador VE.Can 3802 de OSUKL. La ventaja es que sirve para conectar un único dispositivo NMEA 2000, como un transmisor de nivel de depósito, a una red VE.Can. También puede alimentar una red NMEA 2000 de menor tensión directamente a partir de un sistema Victron de 48 V.
Advertencia y solución para sistemas de 24 V y 48 V
Aunque todos los componentes Victron aceptan hasta 70 V de entrada en sus conexiones CAN-bus, algunos equipos NMEA 2000 no. Necesitan una conexión NMEA 2000 alimentada con 12 V, y a veces funcionan hasta 30 o 36 V. Asegúrese de revisar la ficha técnica de todos los equipos NMEA 2000 usados. Si un sistema contiene elementos NMEA 2000 que necesiten una tensión de red inferior a la tensión de la batería, puede considerar el adaptador VE.Can 3802 de OSUKL mencionado. O también puede instalar el cable VE.Can a NMEA 2000 sin su fusible y aportar la alimentación correspondiente a la red NMEA 2000 con un cable adaptador de alimentación de NMEA 2000 (que no proporciona Victron). El puerto VE.Can del dispositivo GX no necesita alimentación externa para funcionar.
5.4. Asistencia del generador Fischer Panda
5.4.1. Introducción
Se puede conectar un generador Fischer Panda al centro de comunicación GX, que permite monitorizarlo y manejarlo, además de arrancarlo y detenerlo automáticamente.
El generador ha de estar conectado al puerto VE.Can del dispositivo GX, que necesita un módulo SAE J1939 de Fischer Panda.
5.4.2. Requisitos
Dispositivo GX con firmware v2.07 o posterior
Generador xControl o iGenerator Fischer Panda
Módulo SAE J1939 CAN de Fischer Panda (referencia del artículo 0006107)
Adaptador FP-Bus a VE.Can de Fischer Panda (referencia del artículo 0023441)
Requisitos de firmware de Fischer Panda:
iControl (para el iGenerator): v2.17 mínimo
Panel iControl: no hay requisito mínimo
xControl (para los generadores de velocidad constante): 4V38 mínimo
Panel xControl: 4V29
Módulo SAE J1939 CAN de Fischer Panda: 2V05
Módulo trifásico Fischer Panda: 4V0b
5.4.3. Instalación y configuración
Conexión de un generador Fischer Panda xControl
El esquema siguiente muestra cómo conectar un generador Fischer Panda xControl.
 |
Conexión de un generador Fischer Panda iControl
El esquema siguiente muestra cómo conectar un generador Fischer Panda iControl.
 |
5.4.4. Mantenimiento
Siempre que haga tareas de mantenimiento en el generador, asegúrese de detenerlo desde el panel de control Fischer Panda. Esto deshabilitará la función de arranque automático de Fischer Panda y garantizará que el generador no pueda arrancarse a distancia, con un Cerbo GX, por ejemplo.
Cuando haya completado las tareas de mantenimiento, asegúrese de habilitar la función de arranque automático de nuevo. Puede hacer esto en el panel de control Fischer Panda del menú generador → arranque automático → encender/apagar.
5.4.5. Aplicación de pantalla multifuncional
La aplicación Marine MFD HTML5 (véase también el capítulo Integración de pantalla multifuncional marina mediante aplicación) también contiene un elemento que permite la monitorización y el control del generador Fischer Panda:

5.5. Conexión de transmisores de nivel de depósito NMEA 2000 de terceros
Para que un transmisor de nivel de depósito NMEA 2000 de otro fabricante pueda verse en el dispositivo GX debe cumplir los siguientes requisitos:
Transmitir el PGN de NMEA 2000 para el nivel de líquido: 127505
La clase de dispositivo NMEA 2000 debe ser o bien General (80) junto con el código de función Transductor (190), o bien Sensor (170). Otra opción es que la clase de dispositivo NMEA 2000 sea Sensores (75) junto con la función Nivel de líquido (150).
Por el momento no se admite una única función que proporcione varios niveles de líquido.
En algunos transmisores de nivel de depósito también se puede configurar la capacidad y el tipo de fluido con los menús del dispositivo GX, por ejemplo el Maretron TLA100. Es posible que los transmisores de otros fabricantes también cuenten con esta opción, merece la pena intentarlo.
Transmisores de nivel de depósito NMEA 2000 compatibles probados:
Maretron TLA100
Maretron TLM100
Transmisor de nivel de líquido Navico Fuel-0 PK, código de referencia 000-11518-001. Tenga en cuenta que necesita una pantalla Navico para configurar la capacidad, el tipo de fluido y otros parámetros del transmisor. Véase el aviso sobre la tensión más abajo.
Oceanic Systems (UK) Ltd (OSUKL) - Transmisor de nivel volumétrico 3271. En caso de que no funcione, se deberá actualizar el firmware. Póngase en contacto con OSUKL para ello. Véase el aviso sobre la tensión más abajo.
Oceanic Systems (UK) Ltd (OSUKL) - Transmisor de nivel de agua 3281. Véase el aviso sobre la tensión más abajo.
Es probable que otros también funcionen. Si conoce alguno que funcione bien, póngase en contacto con nosotros a través de Community -> Modifications (Comunidad -> Modificaciones).
Para conectar una red NMEA 2000 al puerto VE.Can del dispositivo GX, cada uno con un conector de distinto tipo, hay dos soluciones:
El cable VE.Can a NMEA 2000. Permite activar o desactivar la red NMEA 2000 a través del equipo de Victron simplemente insertando o quitando su fusible. Tenga en cuenta la advertencia que se indica más adelante.
El adaptador VE.Can 3802 de OSUKL. La ventaja es que sirve para conectar un único dispositivo NMEA 2000, como un transmisor de nivel de depósito, a una red VE.Can. También puede alimentar una red NMEA 2000 de menor tensión directamente a partir de un sistema Victron de 48 V.
Aviso y solución para sistemas de 24 y 48 V
Aunque todos los componentes Victron aceptan hasta 70 V de entrada en sus conexiones CAN-bus, algunos equipos NMEA 2000 no. Necesitan una conexión NMEA 2000 alimentada con 12 V, y a veces funcionan hasta 30 o 36 V. Asegúrese de revisar la ficha técnica de todos los equipos NMEA 2000 usados. Si un sistema contiene elementos NMEA 2000 que necesiten una tensión de red inferior a la tensión de la batería, puede considerar el adaptador VE.Can 3802 de OSUKL mencionado. O también puede instalar el cable VE.Can a NMEA 2000 sin su fusible y aportar la alimentación correspondiente a la red NMEA 2000 con un cable adaptador de alimentación de NMEA 2000 (que no proporciona Victron). El puerto VE.Can del dispositivo GX no necesita alimentación externa para funcionar.
5.6. Sensores Mopeka Ultrasonic Bluetooth
Se ha añadido a Venus OS compatibilidad con el sensor Mopeka. Estos sensores ultrasónicos usan BLE (Bluetooth Low Energy), una tecnología inalámbrica que permite que los dispositivos se conecten en red dentro de un rango de unos 10 metros, consumiendo significativamente menos energía que la tecnología Bluetooth convencional.
Los sensores Mopeka disponen de detección ultrasónica para depósitos presurizados y no presurizados y para varios productos de depósitos. Según el modelo, los sensores se colocan en la parte superior o en la inferior del depósito. El nivel de líquido, la temperatura y la tensión de la batería del sensor se comunican de forma inalámbrica al dispositivo GX.
Sensores Mopeka compatibles
Sensor Mopeka | Observaciones |
|---|---|
Mopeka Pro Check H2O | |
Mopeka Pro Check LPG | |
Mopeka Pro Check Universal | Necesita Venus OS v3.14 como mínimo |
Mopeka TD40 / TD 200 | |
Mopeka Pro Plus | |
Mopeka Pro 200 |
Nota
Solo son compatibles los sensores indicados anteriormente Otros sensores Mopeka, aunque tengan Bluetooth, no son compatibles.
Para conectar los sensores Mopeka al dispositivo GX por Bluetooth, el dispositivo GX ha de disponer de Bluetooth. Algunos productos GX ya tienen Bluetooth integrado y en los demás puede incorporarse fácilmente con un adaptador Bluetooth USB estándar (se pueden consultar los productos GX que tienen Bluetooth integrado en el resumen de la gama de productos Victron GX).
No obstante, un adaptador Bluetooth USB adicional, también para dispositivos GX con Bluetooth integrado permite la reubicación con limitaciones del radio de Bluetooth (mediante un alargador de cable USB) a las cercanías de otros dispositivos Bluetooth compatibles a los que de otro modo no se llegaría.
Los siguientes adaptadores Bluetooth USB se han probado y se sabe que funcionan:
Adaptador Bluetooth USB | ||||
|---|---|---|---|---|
Insignia (NS-PCY5BMA2) | Logilink BT0037 | TP-Link UB400(UN) | Kinivo BTD-400 | Adaptador Bluetooth USB Ideapro 4.0 |
Ewent EW1085R4 | Laird BT820 | Laird BT851 | - | - |
Aquí se puede consultar una lista de más adaptadores que también se están probando y de adaptadores que se han probado y se sabe que no funcionan: Victron Community.
5.6.1. Instalación

La instalación del sensor Mopeka es muy sencilla. No obstante, en primer lugar, el sensor debe instalarse según las instrucciones de instalación de Mopeka y configurarse mediante la aplicación Mopeka Tank (disponible en Google Play y en Apple App Store). Luego se realiza la instalación y configuración en el dispositivo GX como se describe a continuación.
Asegúrese de que el Bluetooth está habilitado en el menú de sensores Bluetooth (habilitado por defecto).
Vaya a Configuración → I/O → Menú de sensores Bluetooth.
Mueva la Barra de activación a la derecha para activar los sensores Bluetooth.
Desplácese hacia abajo hasta encontrar su sensor Mopeka.
Para activar el sensor, mueva la barra hacia la derecha. Ahora debería aparecer en la Lista de dispositivos.
Repita los pasos 1 a 5 si tiene más de un sensor.
5.6.2. Configuración
Vaya al menú de la Lista de dispositivos.
Desplácese hacia arriba o abajo y seleccione el sensor correspondiente.
Pulse la flecha derecha o la barra de espacio de ese sensor para abrir su Menú de configuración.
Desplácese hacia abajo hasta Configuración y pulse otra vez sobre la flecha derecha o la barra de espacio para abrir el Menú de configuración del sensor.
En el Menú de configuración puede cambiar la capacidad del depósito, seleccionar el tipo de líquido y la unidad de volumen, fijar valores de calibración para los niveles de depósito vacío y lleno y leer el valor actual del sensor.
Tras la configuración, vuelva al Menú de resumen del sensor.
Desplácese hacia abajo, seleccione Dispositivo y pulse otra vez sobre la flecha derecha o la barra de espacio para abrir el Menú de configuración del dispositivo.
En el Menú del dispositivo puede asignar un nombre personalizado al sensor y leer más información sobre el mismo.
Repita los pasos del 1 al 8 para configurar más sensores.

5.6.3. Monitorización del nivel del depósito
 |  |
Los niveles de los depósitos pueden monitorizarse en otros sitios dentro del entorno GX:
Lista de dispositivos del dispositivo GX
Menú resumen del sensor del dispositivo GX
Resumen gráfico del dispositivo GX
Panel de control de VRM
Widgets del menú avanzado de VRM
Widgets de la aplicación VRM
 |  |
5.7. Sensores de temperatura inalámbricos Bluetooth Ruuvi
El sensor Ruuvi dispone de temperatura, humedad y presión atmosférica, que se transmiten de forma inalámbrica al dispositivo GX por Bluetooth.
Para conectar los sensores Ruuvi al dispositivo GX por Bluetooth, el dispositivo GX ha de disponer de Bluetooth. Algunos productos GX ya tienen Bluetooth integrado y en los demás puede incorporarse fácilmente con un adaptador Bluetooth USB estándar (se pueden consultar los productos GX que tienen Bluetooth integrado en el resumen de la gama de productos Victron GX).
No obstante, un adaptador Bluetooth USB adicional, también para dispositivos GX con Bluetooth integrado permite la reubicación con limitaciones del radio de Bluetooth (mediante un alargador de cable USB) a las cercanías de otros dispositivos Bluetooth compatibles a los que de otro modo no se llegaría.
Los siguientes adaptadores Bluetooth USB externos se han probado y se sabe que funcionan:
Adaptador Bluetooth USB | ||||
|---|---|---|---|---|
Insignia (NS-PCY5BMA2) | Logilink BT0037 | TP-Link UB400(UN) | Kinivo BTD-400 | Adaptador Bluetooth USB Ideapro 4.0 |
Ewent EW1085R4 | Laird BT820 | Laird BT851 | - | - |
En esta conversación de la comunidad se puede consultar una lista de más adaptadores que también se están probando y de adaptadores que se han probado y se sabe que no funcionan.
Proceso de instalación
Asegúrese de que el Bluetooth está habilitado en el menú Bluetooth (habilitado por defecto).
Vaya a Configuración → I/O → Menú de sensores Bluetooth y pulse Habilitar para activar los sensores Bluetooth de temperatura.
Los sensores Ruuvi vienen con una pestaña de plástico que se puede extraer. Así se evita que se descarguen cuando no se estén usando. Retire la pestaña de plástico y la unidad empezará a trasmitir información sobre temperatura.

El sensor debe aparecer en el menú, “Ruuvi ####” - con una identificación hexadecimal de 4 dígitos de dispositivo, habilite el sensor Ruuvi concreto.

El submenú de adaptadores Bluetooth muestra una lista de los adaptadores Bluetooth disponibles. La opción “Detección continua” del menú está continuamente buscando nuevos sensores de Bluetooth. Tenga en cuenta que esta opción afecta al funcionamiento del WiFi del dispositivo GX. Habilite esta opción solamente si necesita buscar nuevos sensores Bluetooth. De lo contrario, déjela deshabilitada.
 |  |
Si tiene varios sensores, puede ser conveniente escribir las identificaciones de los dispositivos en la misma caja del sensor para no perderlos.
Ahora el sensor debería poder verse en el menú principal - por defecto aparece como “Sensor de temperatura genérico (##)”

Dentro del menú del sensor de temperatura se puede ajustar el tipo y también darle un nombre.
Vida y estado de la batería para sensores Ruuvi:
Los sensores Ruuvi usan una pila de botón de litio CR2477 de 3V reemplazable con una duración estimada de más de 12 meses, dependiendo de la temperatura ambiente.
Información de la batería:
La tensión y el estado interno de la batería aparecen en el menú del sensor.
Indicadores de estado de la batería:
Estado OK: Tensión de la batería ≥ 2,50 V
Estado bajo del sensor de la batería: Tensión de la batería ≤ 2,50 V
Advertencia de batería baja:
Aparecerá una advertencia de batería baja en la consola remota. Si el dispositivo GX envía información a VRM, la advertencia también aparecerá allí.
El umbral de advertencia depende de la temperatura:
Por debajo de 20 °C: El umbral es 2,0 V
Entre -20 °C y 0 °C: El umbral es 2,3 V
Por encima de 20 °C: El umbral es 2,5 V

Se puede actualizar el firmware del Ruuvi con la propia aplicación móvil de Ruuvi, aunque no es necesario hacerlo si no está teniendo problemas.
5.8. Conexión de sensores de radiación solar, temperatura y velocidad del viento IMT
Ingenieurbüro Mencke & Tegtmeyer GmbH (IMT) ofrece una gama de sensores de radiación solar digitales y de silicona pertenecientes a la serie Si-RS485 que son compatibles con los dispositivos Victron GX.
Compatibilidad
Los sensores opcionales/adicionales de temperatura del módulo externo, temperatura ambiente y velocidad del viento también son compatibles.
Los sensores externos opcionales/adicionales se conectan al sensor de radiación solar con los enchufes preinstalados o están previamente conectados al sensor de radiación solar (módulo externo y temperatura ambiente solamente). Cuando los sensores externos se conectan mediante un sensor de radiación solar adecuado, todos los datos relativos a las mediciones se transmiten al dispositivo GX de Victron con el cable de interfaz único.
Cada modelo de sensor de radiación solar de la serie Si-RS485 tiene una capacidad diferente en lo que respecta a sensores externos (o viene con un sensor externo previamente conectado), por lo que es importante que considere sus necesidades futuras antes de comprar.
Se puede conectar un sensor de temperatura del módulo IMT Tm-RS485-MB independiente (visible como “temperatura de la celda”) o un sensor de temperatura ambiente IMT Ta-ext-RS485-MB (visible como “temperatura externa”) directamente al dispositivo Victron GX, con un sensor de radiación solar o sin un sensor de radiación solar.
Funcionamiento
Los sensores de radiación solar de IMT de la serie Si-RS485 funcionan con una interfaz eléctrica RS485 y un protocolo de comunicación Modbus RTU.
El dispositivo GX de Victron debe tener la versión 2.40 o posterior.
Son compatibles los sensores IMT con versiones de firmware anteriores a v1.53 - para más información, póngase en contacto con IMT.
La conexión física al dispositivo GX de Victron se hace mediante el puerto USB y necesita un cable de interfaz RS485 a USB de Victron.
También se necesita una fuente de alimentación externa CC adecuada (de 12 a 28 VCC), ya que el sensor NO recibe alimentación a través del USB.
Los modelos de IMT más recientes cuentan con un segundo sensor de temperatura que también es compatible.
Conexiones con cables
El esquema de la siguiente guía de instalación representa la configuración del cableado en una instalación normal.
 |
Conexiones con cables
Si-Sensor | Interfaz RS485 a USB de Victron | Señal |
|---|---|---|
Marrón | Naranja | RS485 Data A + |
Naranja | Amarillo | RS485 Data B - |
Rojo | - | Pos alimentación - de 12 a 28 VCC |
Negro | Neg/Gnd alimentación - 0 VCC | |
Negro (grueso) | - | Tierra / Apantallamiento del cable / PE |
- | Rojo | Pos alimentación - 5 VCC (no se usa) |
- | Negro | Neg/Gnd alimentación - 0 VCC (no se usa) |
Marrón | Terminador 1 - 120R (no se usa) | |
Verde | Terminador 2 - 120R (no se usa) |
Notas sobre la instalación
La máxima tensión de la alimentación CC permitida para la gama de sensores de radiación solar de IMT de la serie Si-RS485 es de 28,0 VCC. Según esto, para bancadas o sistemas de baterías de 24 V y 48 V debe usarse en la instalación un convertidor CC-CC de Victron (24/12, 24/24, 48/12 o 48/24) o un adaptador CA-CC de Victron adecuados.
En bancadas o sistemas de baterías de 12 V, el sensor de radiación solar de IMT de la serie Si-RS485 puede alimentarse directamente desde la bancada de baterías y seguirá funcionando hasta la tensión mínima de 10,5 V (según la medición del sensor, teniendo en cuenta la caída de tensión en el cable).
Puede consultar notas y especificaciones detalladas sobre cableado/instalación en la “Guía de referencia rápida” del sensor de radiación solar de IMT de la serie Si-RS485 y en la “Ficha técnica” del cable de interfaz RS485 a USB de Victron.
Para garantizar la integridad de la señal y el buen funcionamiento, compruebe lo siguiente:
Los cables alargadores usados cumplen las especificaciones relativas a la superficie mínima de la sección recogidas en la tabla correspondiente (depende de la tensión de alimentación CC y de la longitud del cable).
Los cables alargadores tienen un apantallamiento y un núcleo de par trenzado adecuados.
El cable original de interfaz RS485 a USB de Victron conectado está reducido a una longitud máxima de 20 cm en instalaciones en las que la longitud de cable total es superior a 10 m o en las que hay problemas de interferencia específicos de la instalación o de la ubicación. En esos casos deben usarse cables apropiados/de alta calidad para toda la extensión de cables y no solo para los alargadores.
Los cables están colocados separados o lejos de los cables principales de alimentación CC o CA.
Todos los cables están correctamente rematados (incluidos lo que no se usen) y bien aislados de los elementos meteorológicos y de la entrada de agua.
La carcasa del sensor no se ha abierto ni manipulado durante la instalación, ya que esto podría comprometer la integridad del sellado (y anular la garantía).
El sensor de radiación solar de IMT de la serie Si-RS485TC cuenta con aislamiento galvánico interno (hasta 1000 V) entre la alimentación y los circuitos Modbus RS485, de modo que la interfaz sin aislamiento RS485 a USB de Victron es adecuada para casi todas las instalaciones.
No obstante, si se prefiere una interfaz aislada RS485 a USB, el único dispositivo compatible es USB485-STIXL de Hjelmslund Electronics (el dispositivo GX no reconocerá ningún otro tipo).
Varios sensores
Se pueden conectar varios sensores de radiación solar de IMT de la serie Si-RS485 a un mismo dispositivo GX de Victron, pero se necesita una interfaz RS485 a USB de Victron exclusiva para cada unidad.
No se pueden combinar varias unidades en una sola interfaz (porque esto no es compatible con el software Venus OS asociado).
Configuración
No suele ser necesario hacer ninguna configuración especial/adicional, la configuración predeterminada de fábrica es apta para la comunicación con un dispositivo GX de Victron.
Sin embargo, si el sensor de radiación de IMT de la serie Si-RS485 se ha usado antes en otro sistema o se ha cambiado la configuración por cualquier motivo, hay que restablecer la configuración predeterminada antes de volverlo a usar.
Para revisar la configuración, descargue la “Herramienta de software de configuración Si-Modbus” de IMT. Siga las instrucciones de la “Documentación del configurador Si Modbus” de IMT y compruebe o actualice los siguientes ajustes:
Dirección Modbus: 1
Tasa de baudios: 9600
Formato de datos: 8N1 (10 Bit)
Si necesita más asistencia para la configuración de sensores de radiación de IMT de la serie Si-RS485, póngase en contacto con IMT Solar directamente.
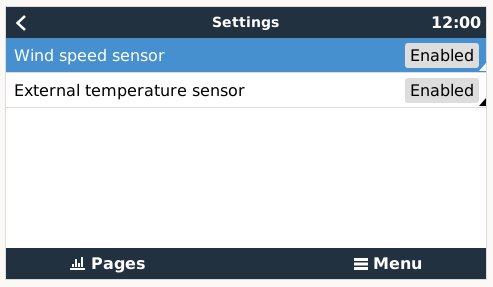
Interfaz del usuario - Dispositivo GX
Al conectar el dispositivo GX de Victron y encender el sensor de radiación de IMT de la serie Si-RS485, éste será detectado automáticamente en pocos minutos y aparecerá en el menú “Lista de dispositivos”.
Dentro del menú “Sensor de radiación solar de IMT de la serie Si-RS485”, se mostrarán automáticamente todos los parámetros disponibles (según los sensores conectados), que se actualizarán en tiempo real.
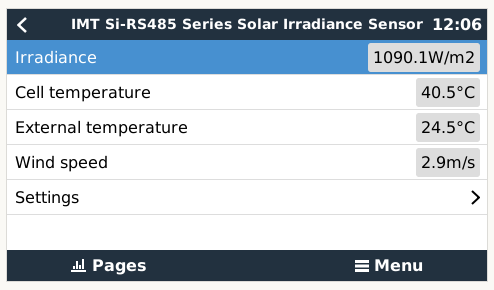
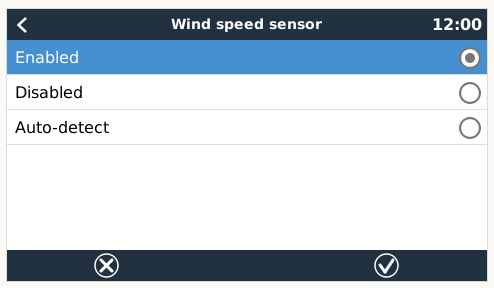
En el submenú de “Ajustes” se pueden habilitar y deshabilitar manualmente los sensores externos opcionales/adicionales conectados al sensor de radiación de IMT de la serie Si-RS485.
 |  |
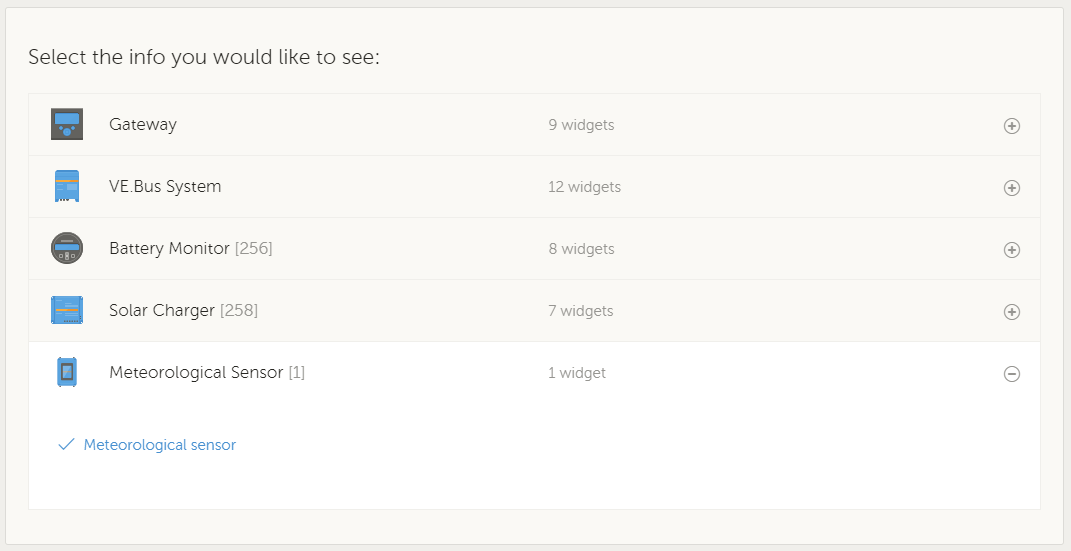
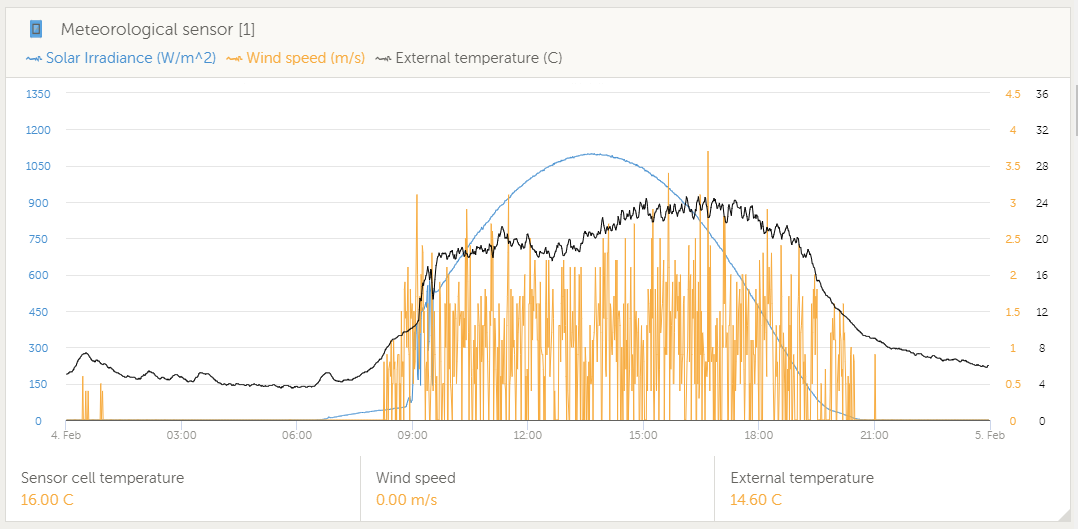
5.8.1. Visualización de datos - VRM
Para revisar los datos históricos registrados en el portal VRM, despliegue la lista del complemento “Sensor meteorológico” y seleccione el complemento “Sensor meteorológico”.
 |
Los datos de los tipos de sensores disponibles aparecerán automáticamente en el gráfico. También se pueden habilitar y deshabilitar sensores o parámetros concretos pulsando en el nombre o la leyenda del sensor.
 |
5.9. Compatibilidad del controlador de generador InteliLite de la serie 4 de ComAp
5.9.1. Introducción

Mediante la integración del controlador del generador InteliLite de la serie 4 de ComAp con un dispositivo GX, se pueden leer datos de CA, así como datos de presión del aceite, temperatura del refrigerante, nivel del depósito y otras lecturas relativas al estado. Además, acepta las señales digitales de arranque/parada del dispositivo GX.
Las siguientes imágenes muestran cómo aparecen los datos en el dispositivo GX:
 |  |  |
¿Cómo funciona?
El dispositivo GX lee y envía datos desde el panel InteliLite 4 a través de Modbus, usando el módulo CM3-Ethernet (necesario) de ComAp como interfaz de comunicación. Se usa el mapeado Modbus predeterminado del controlador InteliLite 4.
Empleando la cadena de identificación que se encuentra en el registro Modbus 1307, el dispositivo GX detecta automáticamente la presencia de un controlador InteliLite 4 de ComAp. Detectará todos los módulos cuyo nombre empiece con InteliLite4-. Esta cadena de identificación también aparece en el título de la ventana InteliConfig.

En el apéndice encontrará un resumen de todos los registros Modbus usados y sus mapeados: Registros de retención Modbus para el controlador ComAp InteliLite 4.
Controladores de generador de ComAp compatibles
Son compatibles los siguientes controladores de generador de la serie 4 de InteliLite:
InteliLite 4 AMF 25, 20, 9 y 8
InteliLite 4 MRS 16
¿Puede funcionar con otros controladores ComAp?
Puede que funcione, pero no se ha probado. El requisito mínimo es que los registros Modbus del controlador ComAp deben ajustarse exactamente a los registros según lo indicado en el resumen de todos los registros Modbus usados y sus mapeados; véase el Registros de retención Modbus para el controlador ComAp InteliLite 4 del apéndice, que representa los registros predeterminados del InteliLite 4 de ComAp.
Módulo ComAp CM-Ethernet compatible
Módulo CM3-Ethernet (código de pedido ComAp: CM3ETHERXBX)
También podría funcionar con el módulo CM-Ethernet estándar (código de pedido ComAp: CM2ETHERXBX), pero no se ha probado.
5.9.2. Instalación y configuración
La instalación y configuración se hace en unos pocos pasos. Solo necesita habilitar el servidor Modbus en su módulo CM3-Ethernet. Esto puede hacerse desde el panel de control o con el software para el controlador, InteliConfig, que puede descargarse del sitio web de ComAp.
No hace falta configurar nada más en el módulo ComAp CM3-Ethernet.
Los Modbus deben ajustarse utilizando el software InteliConfig y de acuerdo con la lista de registros que se muestra en Registros de retención Modbus para el controlador ComAp InteliLite 4.
Configuración de ComAp CM3-Ethernet
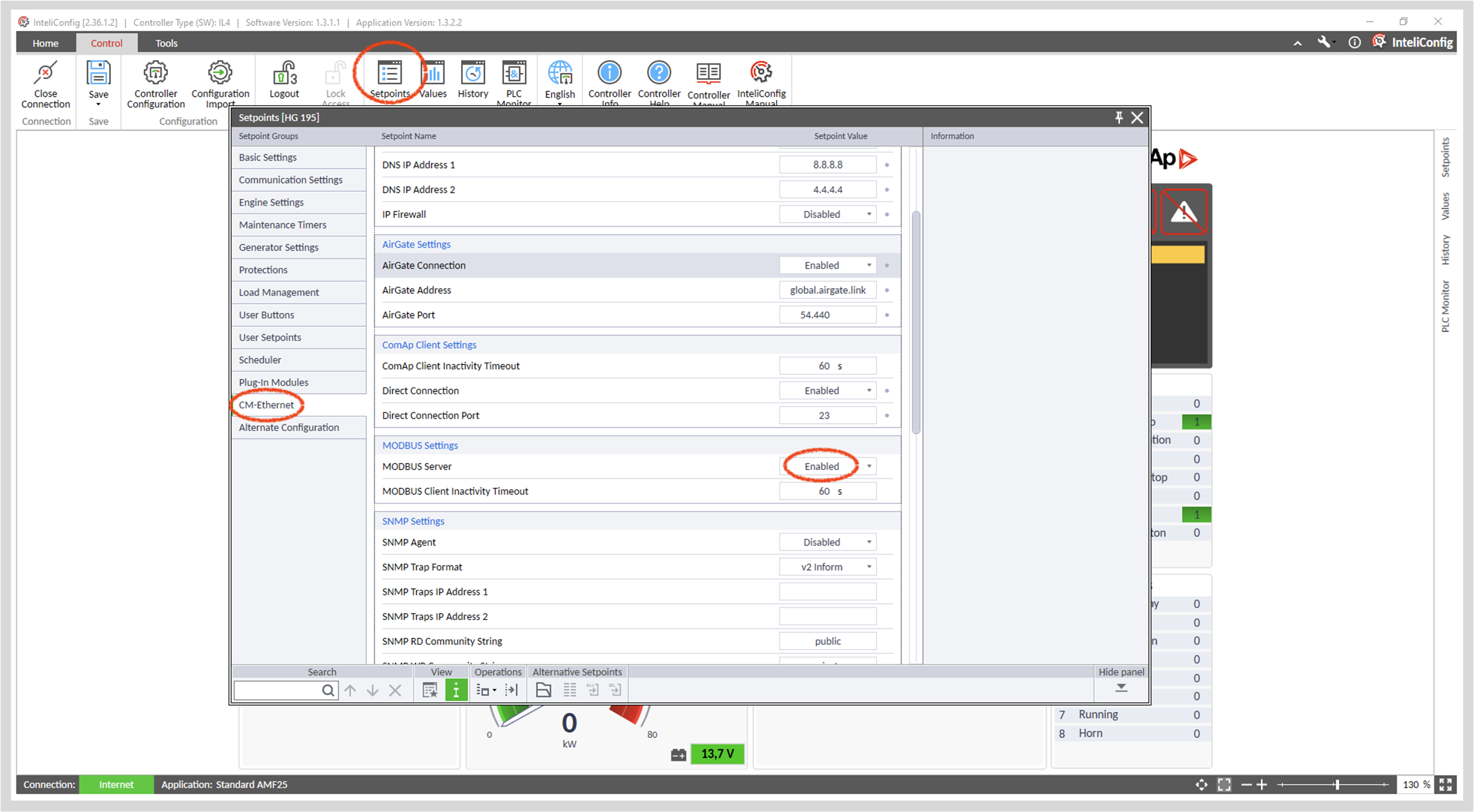
El siguiente procedimiento describe los pasos a seguir con InteliConfig:
Abra la aplicación InteliConfig.
Seleccione la pestaña Setpoint (valor de referencia).
En el siguiente menú, seleccione el módulo CM-Ethernet.
Habilite el servidor Modbus.
 |
Configuración del dispositivo GX
Una vez que el dispositivo GX y el módulo CM-Ethernet estén conectados a la misma red, aparecerá automáticamente en la lista de dispositivos
De lo contrario, revise los ajustes de Modbus en el dispositivo GX, Configuración → Dispositivos Modbus TCP, y asegúrese de que la Detección automática está habilitada (por defecto) o búsquelo; debería detectarse automáticamente y aparecer en el submenú de Dispositivos detectados. Para que esto funcione de forma fiable, la detección automática debe mantenerse encendida. La red se escanea cada diez minutos. Si cambia la dirección de IP, se volverá a encontrar el dispositivo.
 |  |
5.9.3. Requisitos
Dispositivo GX con firmware v2.07 o posterior
Generador xControl o iGenerator Fischer Panda
Módulo SAE J1939 CAN de Fischer Panda (referencia del artículo 0006107)
Adaptador FP-Bus a VE.Can de Fischer Panda (referencia del artículo 0023441)
Requisitos de firmware de Fischer Panda:
iControl (para el iGenerator): v2.17 mínimo
Panel iControl: no hay requisito mínimo
xControl (para los generadores de velocidad constante): 4V38 mínimo
Panel xControl: 4V29
Módulo SAE J1939 CAN de Fischer Panda: 2V05
Módulo trifásico Fischer Panda: 4V0b
5.10. Compatibilidad del controlador de generador de Deep Sea - DSE
5.10.1. Introducción
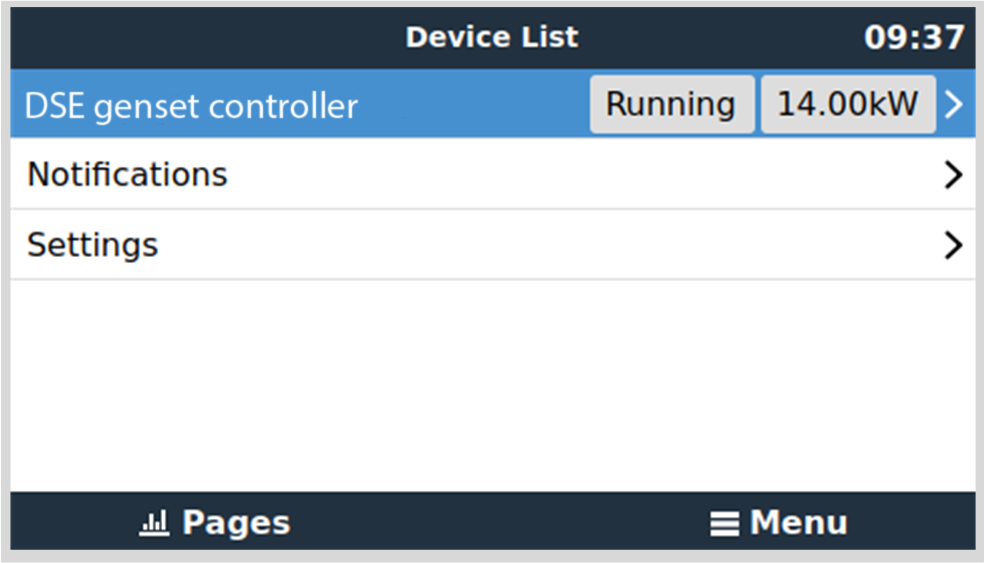
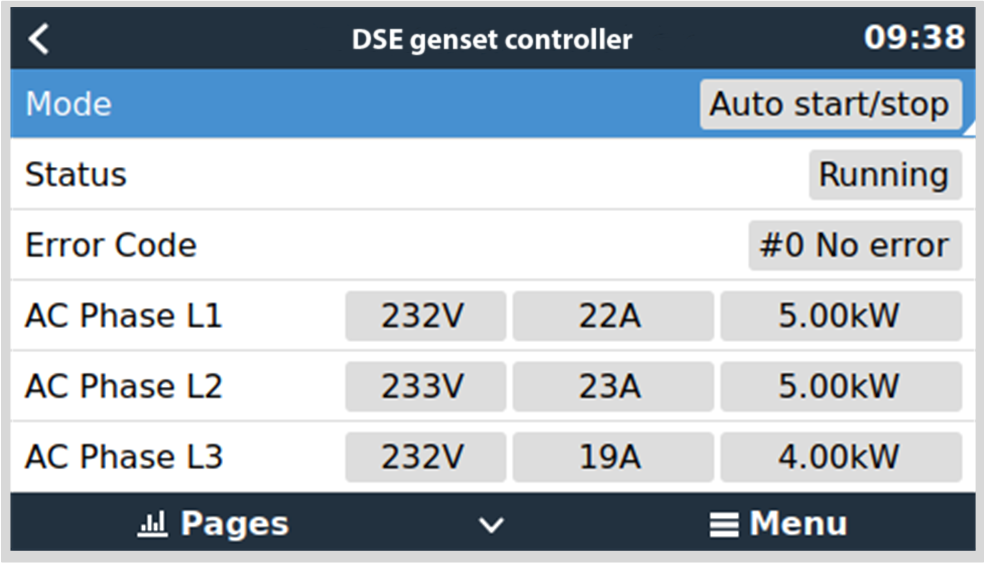
Mediante la integración de un controlador de generador Deep Sea Electronics (DSE) con un dispositivo GX, se pueden leer datos de CA, así como datos de presión del aceite, temperatura del refrigerante, nivel del depósito, número de arranques del motor y otras lecturas relativas al estado. Además, acepta las señales digitales de arranque/parada del dispositivo GX.
Las siguientes imágenes muestran cómo aparecen los datos en el dispositivo GX:
 |  | |
¿Cómo funciona?
El dispositivo GX lee y envía datos desde el controlador DSE a través de la especificación Modbus “GenComm” de Deep Sea Electronics, usando la conexión Ethernet del propio controlador DSE o, para controladores sin una interfaz Ethernet, mediante un dispositivo de comunicaciones USB-a-Ethernet (por ejemplo, DSE855).
Empleando los valores de identificación que se encuentran en los registros 768 y 769 (GenComm página 3, Register offsets 0 y 1), el dispositivo GX detecta automáticamente la presencia de un controlador DSE.
En el apéndice encontrará un resumen de todos los registros Modbus usados y sus mapeados: Registros de retención Modbus para controladores de generadores DSE compatibles.
Controladores de generador de DSE compatibles y dispositivo de comunicación de USB a Ethernet DSE
Son compatibles los siguientes controladores de generador DSE:
Controladores de generador DSE | Dispositivo de comunicación USB a Ethernet de DSE |
|---|---|
DSE4620 | DSE855 O use el puerto Ethernet si alguno de los controladores DSE compatibles lo tiene. |
DSE4510 MKII | |
DSE6110 MKII | |
DSE7310 MKII | |
DSE7410 MKII | |
DSE7420 MKII | |
DSE8610 MKII | |
DSE8660 MKII |
¿Puede funcionar con otros controladores de generador DSE?
Desafortunadamente solo funcionará con los modelos de la lista. Cada modelo tiene valores de registro de identificación diferentes que es necesario añadir manualmente. Actualmente hay un proyecto de la comunidad de Victron en marcha mediante el que puede preguntar si se puede añadir su controlador DSE.
5.10.2. Instalación y configuración
El servidor Modbus del dispositivo de comunicación USB a Ethernet DSE855 está habilitado por defecto. El puerto Modbus TCP está en 502 por defecto, no lo cambie. En otras unidades, consulte el manual de DSE en caso de duda. Tenga en cuenta que el mapeado de registro del dispositivo GX es estático, no puede configurarse.
No hace falta configurar nada más en el dispositivo de comunicación USB a Ethernet DSE855.
No cambie la lista de registro de Modbus en el controlador del generador DSE. Para que el dispositivo GX pueda leer los datos, deben mantenerse los ajustes predeterminados de la configuración del registro de Modbus del controlador DSE. Puede consultar la configuración exacta necesaria de DSE en el apéndice Registros de retención Modbus para controladores de generadores DSE compatibles
Configuración del dispositivo GX
Una vez que el dispositivo GX y el controlador DSE estén conectados a la misma red, aparecerá automáticamente en la lista de dispositivos.
De lo contrario, revise los ajustes de Modbus en el dispositivo GX, Configuración → Dispositivos Modbus TCP, y asegúrese de que la Detección automática está habilitada (por defecto) o búsquelo; debería detectarse automáticamente y aparecer en el submenú de Dispositivos detectados. Para que esto funcione de forma fiable, la detección automática debe mantenerse encendida. La red se escanea cada diez minutos. Si cambia la dirección de IP, se volverá a encontrar el dispositivo.
| |
5.11. Lectura de datos genéricos del alternador procedente de sensores CC NMEA 2000
Venus OS es compatible con sensores CC NMEA 2000 que se pueden usar para leer la tensión, la corriente y la temperatura de un alternador genérico. Tenga en cuenta que los datos solo se muestran. No se usan para otros cálculos o funciones.
Los sensores CC NMEA 2000 de otros fabricantes deben cumplir los siguientes requisitos:
La clase del dispositivo NMEA 2000 ha de ser 35, Generación eléctrica.
La función del dispositivo NMEA 2000 ha de ser 141, Generador CC.
El tipo CC debe fijarse en alternador en los detalles CC de PGN 127506.
La tensión, la corriente y la temperatura deben transmitirse en PGN 127508, Estado de la batería.
En principio, la mayoría de los sensores CC NMEA 2000 deben funcionar.
Se ha probado la compatibilidad con:
Para conectar una red NMEA 2000 al puerto VE.Can del dispositivo GX, cada uno con un conector de distinto estilo, hay dos soluciones:
El cable VE.Can a NMEA 2000: Simplemente insertando o quitando el fusible, permite activar la red NMEA 2000 a través del equipo de Victron. Tenga en cuenta la advertencia que se indica más adelante.
El adaptador VE.Can 3802 de OSUKL. La ventaja es que sirve para conectar un único dispositivo NMEA 2000, como un transmisor de nivel de depósito, a una red VE.Can. También puede alimentar una red NMEA 2000 de menor tensión directamente a partir de un sistema Victron de 48 V.
Advertencia y solución para sistemas de 24 V y 48 V
Aunque todos los componentes Victron aceptan hasta 70 V de entrada en sus conexiones CAN-bus, algunos equipos NMEA 2000 no. Necesitan una conexión NMEA 2000 alimentada con 12 V, y a veces funcionan hasta 30 o 36 V. Asegúrese de revisar la ficha técnica de todos los equipos NMEA 2000 usados. Si un sistema contiene elementos NMEA 2000 que necesiten una tensión de red inferior a la tensión de la batería, puede considerar el adaptador VE.Can 3802 de OSUKL mencionado. O también puede instalar el cable VE.Can a NMEA 2000 sin su fusible y aportar la alimentación correspondiente a la red NMEA 2000 con un cable adaptador de alimentación de NMEA 2000 (que no proporciona Victron). El puerto VE.Can del dispositivo GX no necesita alimentación externa para funcionar.
5.11.1. Compatibilidad con el regulador del alternador Wakespeed WS500
Introducción
El WS500 es un regulador alternador inteligente externo con comunicación CAN-bus y NMEA 2000 especialmente adecuado en aplicaciones náuticas y de caravanas y autocaravanas. El WS500 es compatible con Venus OS y ofrece la posibilidad de monitorizar el rendimiento de sus alternadores mediante un dispositivo GX.
Requisitos
Los requisitos necesarios para la integración de WS500 son:
Firmware Venus OS v2.90 o superior instalado en su dispositivo GX
Firmware Wakespeed WS500 2.5.0 o superior instalado en el controlador WS500
El WS500 debe conectarse al puerto VE.Can del dispositivo GX. No es posible monitorizar el WS500 si se conecta al puerto BMS-Can de un Cerbo GX.
Conexión del WS500 a VE.Can
Tanto el WS500 como VE.Can utilizan conectores RJ45 para sus puertos CAN.
Sin embargo, tienen diferentes patillas. Esto significa que no se puede usar un cable de red normal (cable UTP recto). Se necesita un cable cruzado. Usted mismo tendrá que hacer este cable cruzado. En el siguiente diagrama se muestran las patillas de los dos dispositivos.

Los pines importantes a tener en cuenta son el 7 y el 8 para CAN-H y CAN-L en la parte VE.Can y el 1 y el 2 para CAN-H y CAN-L en la parte WS500.
De modo que se necesita un cable para que los pines 1 y 2 de un lado estén conectados a los pines 7 y 8 del otro. El pin 7 va al pin 1 y el pin 8 va al pin 2.
El conector RJ45 con pin 7 y 8 en un extremo se conecta con el puerto VE.Can del dispositivo GX. El otro extremo del cable con pin 1 y 2 se conecta con el controlador WS500. Deben colocarse terminadores en ambos extremos.
El color del cable que haga usted mismo no es importante. Wakespeed también ofrece un cable ya configurado con un conector RJ45 azul en un extremo que debe conectarse al puerto VE.Can.
Nota
Tenga en cuenta que los terminadores negros suministrados por Wakespeed y los azules suministrados por Victron no son intercambiables. De modo que coloque el terminador Victron en la parte de Victron de la red y el terminador de Wakespeed en la de Wakespeed.
Ejemplo de cableado
El siguiente ejemplo muestra un resumen del cableado recomendado basado en una instalación con un Lynx Smart BMS, distribuidores Lynx y un Cerbo GX.
La colocación correcta del shunt del alternador (que no debe confundirse con el shunt del BMV o el SmartShunt) es importante para la correcta conexión del cable del sensor de corriente.
Consulte los manuales del WS500 y del alternador para ver el cableado completo entre el WS500 y el alternador.

Interfaz de usuario del dispositivo GX para WS500
Una vez que el WS500 se ha conectado al dispositivo GX, la lista de dispositivos incluye una entrada para el regulador.
El menú del WS500 proporciona entonces la siguiente información:
Salida: tensión, corriente y potencia según la información recibida del regulador del alternador
Temperatura: el sensor de temperatura del WS500 mide la temperatura del alternador
Estado: estado del proceso de carga del WS500
Apagado cuando no está cargando
Carga inicial, absorción o flotación cuando el WS500 está usando su propio algoritmo de carga
Control externo cuando está controlado por un BMS como un Lynx Smart BMS
Estado de la red:
Independiente, si el regulador está funcionando por su cuenta
Maestro de grupo cuando está proporcionando metas de carga a otro dispositivo WS500
Esclavo cuando acepta instrucciones de carga de otro dispositivo, como un WS500 o un BMS.
Error: indica que el WS500 se encuentra en un estado de error. Se pueden consultar todos los códigos y mensajes de error en la guía de Configuración y Comunicaciones de Wakespeed. Véanse también los errores n.º 91 y n.º 92 en el apéndice
Field Drive: indica el porcentaje de field drive que el WS500 envía al alternador en la conexión de campo.
Velocidad: velocidad a la que gira el alternador en RPM. Este es el dato que comunica el estátor y si no es correcto, se puede ajustar configurando la opción Alt Poles en la línea de configuración SCT de Wakespeed.
Velocidad del motor: se indica en RPM. Este dato se obtiene
mediante cálculo a partir de la velocidad del alternador y la Eng/Alt drive ratio configurada por la línea de configuración SCT
NMEA 2000, si el WS500 está recibiendo las RPM del motor de PGN127488
J1939, si el WS500 está recibiendo las RPM del motor de PGN61444
También es posible crear un nombre personalizado para el WS500 en el menú del dispositivo. Esto hace que el WS500 actualice la línea de configuración $SCN del regulador.
 |  |  |
Datos del WS500 en el portal VRM
Los datos del WS500 que pueden mostrarse en nuestro portal VRM son: corriente, tensión y temperatura.

Actualmente hay tres widgets disponibles en VRM
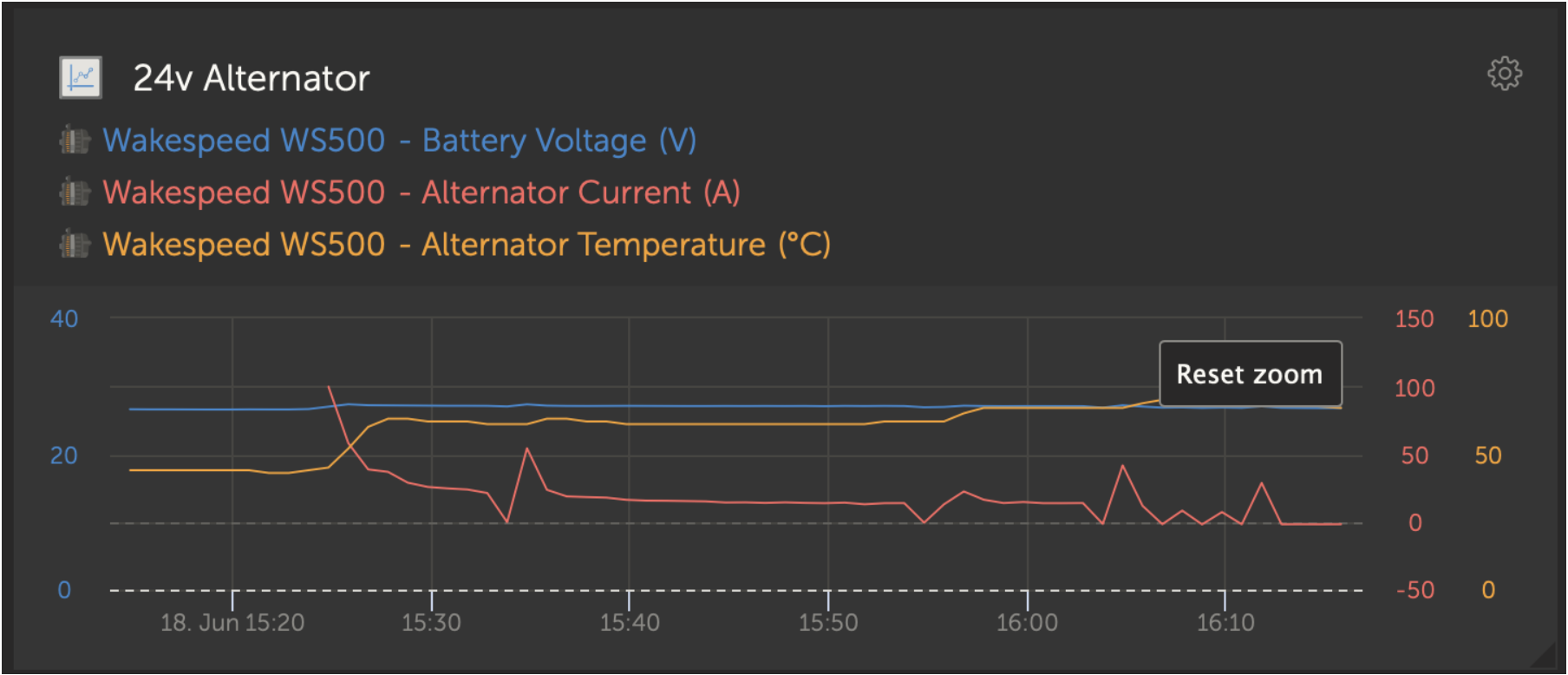
Widget personalizado VRM que muestra tensión, corriente y temperatura de WS500
Resolución de problemas y preguntas frecuentes
Para información adicional sobre asistencia técnica y resolución de problemas, póngase en contacto con el servicio técnico de Wakespeed directamente.
Códigos de error n.º 91 y n.º 92
Venus OS informará de todos los errores que pueda generar el WS500 según lo descrito en la guía de Configuración y Comunicaciones de Wakespeed. En sistemas con BMS integrado, los siguientes errores son críticos mientras los eventos están activos y requieren especial atención.
#91: Lost connection with BMS
El WS500 ha perdido la comunicación con el BMS y pasará al modo configurado de “Volver al inicio”. En cuanto se haya restablecido la comunicación con el BMS, volverá a seguir los objetivos de carga indicados por el BMS.
#92: ATC disabled through feature IN
El BMS ha indicado un evento de desconexión de la carga mediante la opción del cable y en consecuencia el WS500 ha vuelto al estado Apagado.
Los datos de corriente y potencia no aparecen en el menú del dispositivo WS500
Esto no supone ninguno problema y sencillamente se debe a cómo está instalado el sistema y cómo está previsto que sea.
No hay un del alternador[1] instalado
El shunt del alternador está instalado pero no está bien configurado. Revise el ajuste de ShuntAtBat y el de Ignorar sensor con las herramientas de configuración de Wakespeed.
[1] El shunt del alternador puede instalarse en serie con el alternador para permitir la lectura de la corriente y la potencia de salida del alternador. El cableado del sensor se conecta directamente al WS500. Esta es una función opcional para visualización. Si el shunt no está instalado, el dispositivo GX mostrará otros datos del alternador, como el porcentaje de tensión de campo y la tensión de salida, etc. pero no aparecerán ni la corriente ni la potencia de salida.
Preguntas frecuentes
P1: ¿Se usa la corriente de salida del alternador (si se mide) para algo más aparte de para visualización?
R1: Por el momento, solo se muestra el dato. Quizá más adelante habrá integración DVCC, de modo que el dispositivo GX controle la cantidad de corriente que quiere que genere el WS500 y reparta la corriente de carga deseada entre el WS500 y los MPPT, por ejemplo.
P2: ¿Para qué se usa la corriente de salida de la batería? ¿Puede leerse por CAN-bus mediante un Lynx Smart BMS, otros monitores de baterías o un dispositivo GX?
R2: Sí, se puede leer el dato de corriente mediante CAN-bus y Lynx Smart BMS.
En ese caso, el shunt del WS500 puede configurarse para el alternador y así comunicar el dato de cantidad de corriente que el alternador está produciendo. El WS500 usa la corriente del Lynx Smart BMS para garantizar que solo llega a la batería lo que la batería necesita. De modo que si la batería pide 100 A y el WS500 comunica 200 A al alternador, se usarán 100 A para apoyar a las cargas. Supone una importante mejora en el cálculo de la carga CC.
P3: ¿Hay alguna recomendación de cableado para los sistemas que incluyan un Lynx Smart BMS?
R3: Sí. Hemos creado numerosos ejemplos de sistema que muestran el cableado completo y contienen información adicional importante. Por ejemplo, un sistema de un catamarán con dos WS500 o un sistema equipado con un alternador adicional controlado por un WS500. Estos ejemplos le pueden servir de base para su propio sistema.
Los ejemplos de sistemas se pueden descargar de la página de producto del Lynx Smart BMS.
P4: ¿Cuál es el cableado recomendado para sistemas que no contienen un Lynx Smart BMS?
R4: Wakespeed facilita una guía de inicio rápido que muestra cómo configurar el regulador mediante interruptores DIP y un resumen de todas las conexiones de cableado en el juego de cables que viene con la unidad.
El manual de producto del WS500 contiene diagramas de cableado adicionales que muestran en detalle cómo se conecta el juego de cables.
Tenga en cuenta que el shunt debe conectarse a la batería y que el WS500 debe configurarse con el shunt en la batería.