15. Compatibilidad con RV-C
15.1. Introducción a RV-C
Victron admite el protocolo RV-C a partir del firmware Venus OS v2.90.
¿Qué es el protocolo RV-C?
El protocolo RV-C (Recreation Vehicle (caravanas)-CAN) es a las caravanas y autocaravanas lo que NMEA 2000 (también conocido como N2K) es a los barcos: un protocolo de comunicación basado en CAN-bus (Controller Area Network bus) que se utiliza principalmente en caravanas y autocaravanas en EE. UU. para que los dispositivos y los aparatos instalados puedan comunicarse y trabajar juntos.
Hay dos funciones básicas: RV-C out (salida) y RV-C in (entrada)
RV-C out permite controlar y monitorizar dispositivos compatibles de Victron desde un panel de control RV-C.
RV-C in permite recibir datos de uno o más dispositivos RV-C compatibles y mostrarlos en el dispositivo GX.
En resumen, cuando esta opción está habilitada con el dispositivo GX conectado a una red RV-C, un panel de control RV-C puede leer datos de Victron, p. ej.: desde un BMV o un inversor/cargador, y mostrárselos al usuario e incluso controlar algunos de ellos. Los dispositivos RV-C compatibles aparecen en la unidad GX al mismo tiempo.
RV-C se crea sobre SAE J1939.
15.2. Limitaciones
Dispositivos VE.Can
Los protocolos RV-C y VE.Can no son compatibles entre sí: se puede configurar un puerto VE.Can de un dispositivo GX para el perfil VE.Can o para el perfil RV-C, pero no para los dos a la vez.
Usar un dispositivo GX con un solo puerto VE.Can totalmente funcional significa que hay una limitación respecto a los dispositivos que se pueden usar en el sistema cuando se necesita la conexión a RV-C.
Productos habitualmente asociados a las caravanas que no podrían usarse en la situación descrita anteriormente:
el Lynx Smart BMS no puede usarse porque tiene que conectarse mediante VE.Can. Use un VE.Bus BMS en su lugar (se conecta al puerto VE.Bus).
el Lynx Smart Shunt no puede usarse, use un SmartShunt en su lugar (se conecta mediante VE.Direct).
el regulador alternador Wakespeed no puede conectarse a la monitorización mediante el dispositivo GX.
los controladores de carga MPPT de mayor potencia deben conectarse con su conexión VE.Direct. No en una red VE.Can.
En función del sistema, actualmente esto también limita la selección de un dispositivo GX adecuado:
Color Control GX (CCGX), MultiPlus-II GX y EasySolar-II GX: solo tiene un puerto VE.Can, de modo que solo puede configurarse para VE.Can o RV-C, no para los dos. Por este motivo, no se puede crear un sistema, por ejemplo, con un Lynx Smart BMS (que tiene que estar conectado en un puerto VE.Can) y tenerlo conectado a RV-C al mismo tiempo.
Cerbo GX: la generación actual solo tiene un puerto VE.Can (completamente funcional) VE.Can. Como se ha explicado anteriormente, tiene que ser VE.Can o RV-C, pero no los dos.
Nota
Tenga en cuenta que el puerto BMS-Can del Cerbo GX está restringido y no puede usarse como puerto RV-C.
Venus GX: tiene dos puertos VE.Can. De modo que puede conectarse a las dos redes, VE.Can y RV-C, a la vez.
Ekrano GX: tiene dos puertos VE.Can. De modo que puede conectarse a las dos redes, VE.Can y RV-C, a la vez.
15.3. Dispositivos compatibles
Venus v2.90 incorpora compatibilidad RV-C out a los siguientes productos:
Producto Victron | Observaciones |
|---|---|
Inversor/cargador VE.Bus | La parte de inversor y cargador puede controlarse por separado (on/off) desde RV-C. También se puede fijar un límite de corriente de entrada de la red. |
Cargador Smart IP43 120-240 V | Puede activarse/desactivarse (on/off) mediante RV-C. También se puede fijar un límite de corriente de entrada de la red. |
Cargador Smart IP43 230 V | El cargador Smart IP43 230 V no puede controlarse y es de solo lectura. |
Skylla-i y Skylla-IP44/-IP65 | Tenga en cuenta que para esto se necesitan dos interfaces CAN-bus completamente funcionales. Por ahora, solo el Venus GX y el Ekrano GX tienen estas dos interfaces. |
Inversor VE.Direct | |
Inversor Smart e Inversor RS | |
Cargadores solares, incl. MPPT RS | |
Baterías: BMV, SmartShunt, Lynx Shunt, Lynx Ion BMS, Lynx Smart BMS | |
Depósitos; Transmisores de nivel de depósito conectados a: la entrada de nivel del depósito del dispositivo GX un GX Tank 140 el puerto VE.Can y/o NMEA 2000 del dispositivo GX |
El Venus OS también admite datos de RV-C in de:
Sensores de depósito RV-C
Tenga en cuenta que Garnet SeeLeveL II 709 no dispone de valores absolutos de nivel del depósito y capacidad del depósito. Por lo que solo se muestra el nivel relativo. Los depósitos de otro dispositivo GX tendrán valores absolutos de nivel y capacidad, pero no pueden configurarse con RV-C.
Baterías de RV-C: Lithionics es la única batería RV-C compatible (compatible también con DVCC)
En el apéndice puede consultar parámetros avanzados y programación RV-C.
15.4. Configuración de RV-C
El RV-C se configura mediante el dispositivo GX.:
Abra la consola remota y vaya a Ajustes → Servicios → Puertos VE.Can → Perfil CAN-bus.
Abra el perfil CAN-bus y seleccione el perfil RV-C (250 kbit/s).
El perfil RV-C empezará a funcionar y el perfil seleccionado anteriormente se apagará (los equipos asociados, como los dispositivos VE.Can, ya no estarán disponibles en la interfaz gráfica del usuario).
 |  |  |
15.4.1. Configuración de dispositivos con RV-C out

Los dispositivos con RV-C out pueden configurarse desde el submenú Dispositivos del menú del Puerto VE.Can.
El submenú Dispositivos contiene todos los dispositivos de la red RV-C incluidos los dispositivos RV-C out. Estos últimos se identifican mediante su [VRM# instance], que puede usarse para identificar los dispositivos “reales” del menú raíz del dispositivo GX. El hexadecimal de la parte derecha es la Dirección de origen.

Cuando entre en el submenú de un dispositivo RV-C, verá la información general del dispositivo RV-C y, desplazándose hacia el final de la página, el menú de configuración. Para poder ver el menú de configuración se necesita tener acceso de usuario e instalador por lo menos. Véase el apartado Estructura del menú y parámetros configurables.

La instancia para los DGN correspondientes puede modificarse en el submenú de Configuración.

15.5. Compatibilidad de Garnet SeeLevel II 709-RVC y el dispositivo GX de Victron
Con la compatibilidad de RV-C con Venus OS, también se puede usar el Garnet SeeLevel 709-RVC y mostrar sus datos en el dispositivo GX y en VRM. Todos los modelos 709-RVC y el SeeLevel Soul son compatibles con el GX.
Tenga en cuenta las limitaciones descritas en el apartado de Limitaciones. Esto significa que cuando se usa un puerto CAN-bus en el dispositivo GX para RV-C, no puede usarse para otros fines al mismo tiempo, como las opciones VE.Can y NMEA 2000 comunes. Hay que elegir entre VE.Can/N2K o RV-C, a no ser que se trate de un Venus GX o un Ekrano GX que tienen dos puertos VE.Can completos. Si esto limita demasiado el uso del dispositivo GX en lo que respecta a la conectividad mediante VE.Can, es recomendable usar el Garnet SeeLevel 709-N2K en su lugar.
Tenga en cuenta que los niveles de depósito mostrados en el GX de Victron se expresarán como porcentaje y no como volumen real en litros, galones o alguna otra unidad de volumen.
15.5.1. Conexión del sensor del nivel de depósito Garnet SeeLevel II 709-RVC a un dispositivo GX
Antes de conectarlo a un dispositivo GX, compruebe que el Garnet SeeLevel 709-RVC se ha instalado y configurado correctamente de conformidad con las instrucciones de instalación de Garnet.
Mientras que el puerto VE.Can necesita un conector RJ45, el panel del Garnet SeeLevel cuenta con un conector multipin RV-C o una conexión por cable con un cable negro, uno azul y uno blanco cada una. Para poder conectarlos, se debe montar un cable adaptador según la asignación de pines de la tabla siguiente.
Lo más adecuado es un cable CAT5 Ethernet, que se puede adquirir en las tiendas, en el que antes se corta uno de los extremos y se conecta al panel del Garnet.
Código de colores de los cables del panel del Garnet | Conector RV-C | VE.Can RJ45 de Victron | Código de colores de los cables de CAT5 Ethernet | Señal |
|---|---|---|---|---|
Negro | 4 | 3 | Verde/blanco | Puesta a tierra |
Azul | 3 | 8 | Marrón | CAN-L |
Blanco | 2 | 7 | Marrón/blanco | CAN-H |
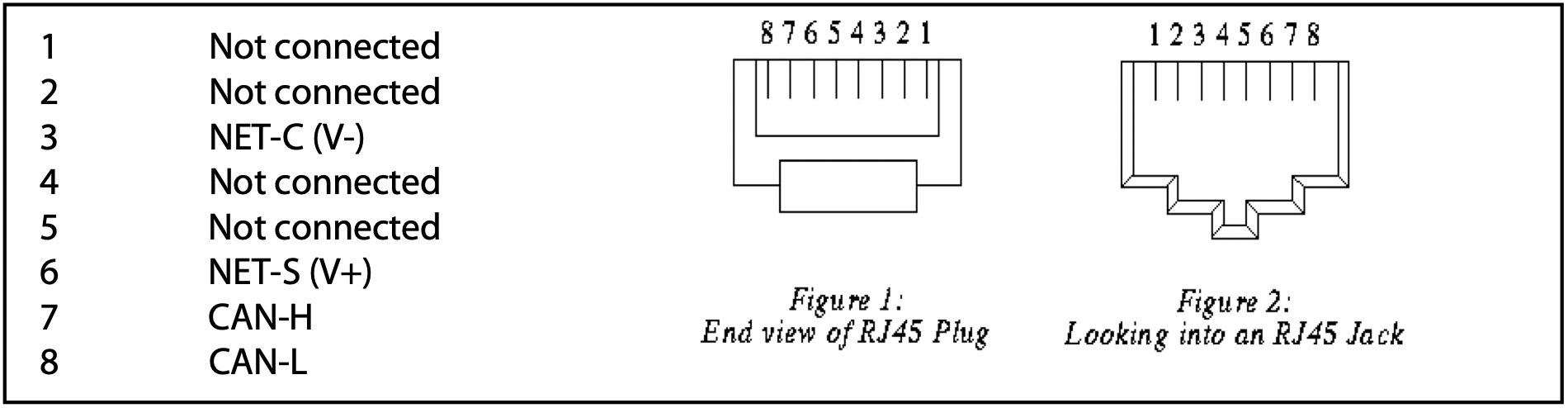
Pinout VE.Can de Victron
15.5.2. Instalación y configuración
Lleve el cable desde el panel del Garnet hasta el dispositivo GX.
Asegúrese de que el Garnet y el dispositivo GX están apagados.
Conecte el enchufe RJ45 al puerto VE.Can al dispositivo GX y el otro extremo al cable adaptador del panel del Garnet.
Asegúrese de que la terminación del bus es correcta. Para el dispositivo GX: Use el conector VE.Can RJ45 que se incluye. La terminación correcta del bus es imprescindible para el Garnet SeeLevel si es el único dispositivo RV-C.
Una vez que todo esté correctamente instalado, encienda los dos dispositivos.
Realice la configuración del RV-C como se explica en el apartado de configuración de RV-C para configurar correctamente el puerto VE.Can para el perfil RV-C.